Forums › Détente, discussions et events › Vos autres Projets › souris autonome
- Ce sujet contient 11 réponses, 5 participants et a été mis à jour pour la dernière fois par Xoff, le 7 Oct. 2013, 06:27.
-
AuteurMessages
-
29 septembre 2013 à 18:04 #6899Anonyme
Pour rendre semi autonome un R2, il vaut mieux essayer sur un petite glute. Une carte Arduino Léonardo en guise de cerveau. 
[img]http://i76.servimg.com/u/f76/15/71/87/37/img_3410.jpg [/img] et un banc d’essai pour les tests de programmes

[img]http://i76.servimg.com/u/f76/15/71/87/37/img_3411.jpg [/img] une carte Arduino Uno avec un afficheur, deux boutons poussoir et deux inters avec circuit anti rebonds, un potar multitours, des leds avec buffers et une plaque d’essais.
Si la souris fonctionne, je l’amène à FACTS Gent.
29 septembre 2013 à 18:51 #33802très sympa ce projet, tu lui mettras une coque de mouse droid par la suite 29 septembre 2013 à 21:01 #33803Chouette ! Ca me rappelle un robot que j’avais réalisé il y a quelques (!) années,( avec un uP Motorola 6800 ! ça donne une idée de la date pour ceux qui connaissent…) qui trouvait le chemin tout seul pour sortir d’un labyrinthe grâce à une boussole et à des capteurs infrarouges…et il faisait déjà des sons de R2 !
") 30 septembre 2013 à 09:19 #33804Anonyme
30 septembre 2013 à 09:19 #33804AnonymeExcellent ")
Mais je n’ai pas vraiment compris le but de ton banc d’essai versus test direct sur la souris ?! Autant avec R2 qui ne tient pas sur la table, je pense que ça peu avoir un sens, mais la souris ne pose pas ce souci. Qu’est-ce que je rate ?
THX-1138 : Motorola 6502a (descendant du 6800), programmation en assembleur sur Oric Atmos 1984 en ce qui me concerne
30 septembre 2013 à 18:54 #33805AnonymeLe banc d’essai est pour tester les morceaux de programme, par exemple inversion du sens des moteurs, ou le calcul de distance d’un obstacle. Il est plus facile de visualiser des leds et de simuler des contacts avec des boutons, que de monter directement sur un petit robot dans un premier temps. Le robot peut filer sous un meuble ou finir sa course dans le vase de tante Gertrude avec les ennuis diplomatiques qui vont avec. le petit robot plein pot fait 0.5 m/s, la table est un peu courte.
Le problème avec les robots autonomes, ils ne font pas obligatoirement ce que tu penses.
Il y a 30 ans , j’avais dèjà servi avec une carte à microproceseur Z80 de Zilog, avec un assembleur et un débugeur sur TRS 80. Les moteurs viennent de là.
Le 6508 était utilisé pour des clarificateurs d’images à une certaine époque.
30 septembre 2013 à 22:17 #33806le R2 autopsié derrière, ce ne serait pas le R2 radiocommandé de 78 ? parce que j’en ai un sans la télécommande, tu n’as pas des infos pour pouvoir bricoler/adapter une radiocommande ?
1 octobre 2013 à 11:52 #33808AnonymeLe mien vient de la déchetterie, je n’ai pas la radio. il y a une led sur le devant, un moteur pour la rotation du dôme et deux moteurs pour le déplacement. le tout alimenter en 3 volts. Sur le morceau de circuit c’était les restes d’un récepteur à super-réaction comme beaucoup de jouets de l’époque, surement en 27,125 MHz. c’est la position du dôme qui donne le sens de marche du robot, il y a un système à contacts tournants.
Il y a moyen de faire quelque chose avec un récepteur chinois et un variateur de moteur à balais. Il me faut connaitre la radio dont tu disposes ?
1 octobre 2013 à 13:09 #33807j’aimerais trouver plus souvent des R2 à la poubelle j’ai testé avec une 27Mhz (de micro voiture radio commandé), mais à priori rien
mais il faut déjà que j’achète des piles car je ne suis pas certain de celles que j’ai utilisé
je te tiens au courant, merci
6 octobre 2013 à 19:12 #33809Anonymedes nouvelles de mon machin 
[img]http://i56.servimg.com/u/f56/15/71/87/37/robot_10.jpg [/img] De haut en bas, télémètre ultra son pour les obstacles à 80 cm, cellules photo pour le trajet du robot, recherche du point le plus lumineux, cellules infra rouge pour les obstacles à 15 cm, contacts pour ceux qui sont au sol. il manque la détection “manque de plancher” (Si, si ça peut servir) et les moustaches sur les contacts.

[img]http://i56.servimg.com/u/f56/15/71/87/37/robot_11.jpg [/img] 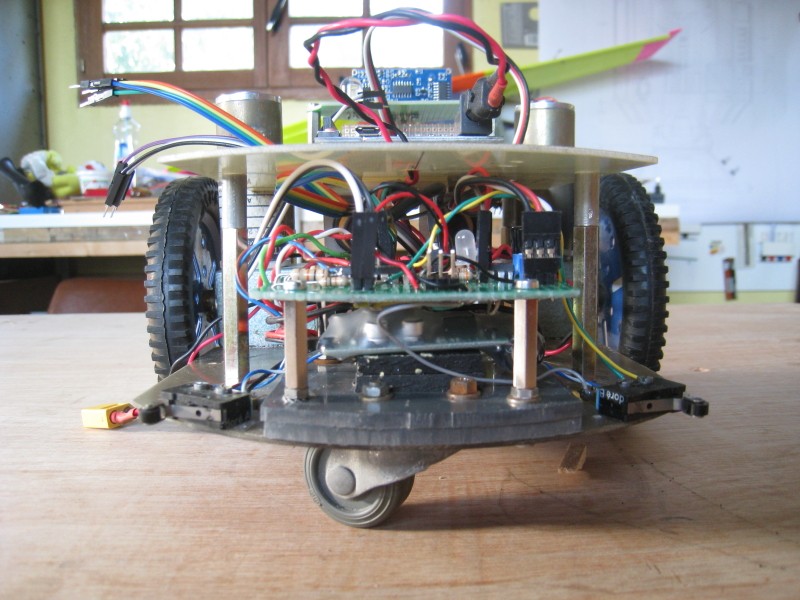
[img]http://i56.servimg.com/u/f56/15/71/87/37/robot_12.jpg [/img] en platine de traitement anti rebond et traitement des cellules photo resistance

[img]http://i56.servimg.com/u/f56/15/71/87/37/robot_13.jpg [/img] Reste à cabler la carte Arduino et finir le programme.
6 octobre 2013 à 22:07 #33810super ce machin, une fois terminé et habillé ça doit être sympa de le voir se ballader ! 7 octobre 2013 à 06:17 #33811AnonymeJ’ai pris mon entrée pour la FACT de Gent, je pense le prendre avec, le programme sera en partie débuggé. Je passe quelque jours chez les Teutons, il me restera une semaine ça va le faire.
7 octobre 2013 à 06:27 #33812excellent et bon courage pour le debuggage -
AuteurMessages
- Vous devez être connecté pour répondre à ce sujet.